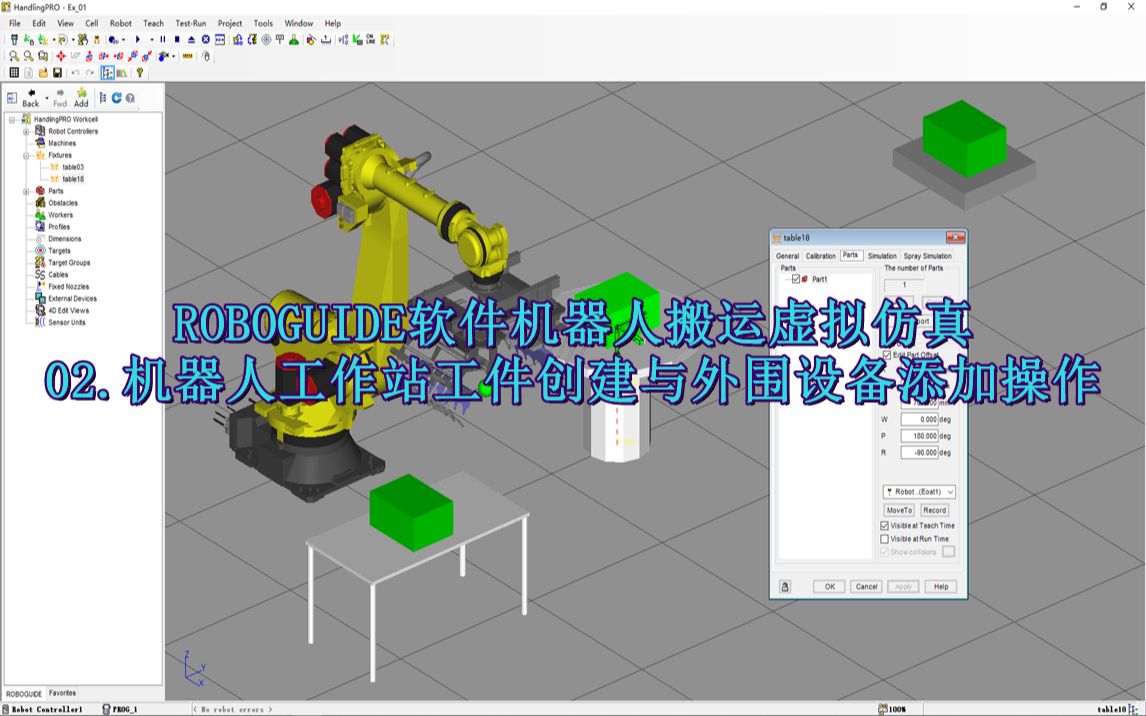
ROBOGUIDE是FANUC机器人系统集成的虚拟仿真软件,广泛应用于机器人搬运、焊接、喷涂等工业场景的离线编程和动态模拟。在搬运应用中,ROBOGUIDE允许用户在虚拟环境中创建完整的机器人工作站,包括工件模型和外围设备,从而优化机器人路径、验证操作逻辑并减少实际调试时间。以下是工件创建与外围设备添加的关键操作步骤。
工件创建是构建搬运工作站的基础。在ROBOGUIDE中,用户首先通过CAD导入或内置建模工具生成工件模型。对于搬运应用,工件通常代表被机器人抓取和移动的物体,如箱子、零件或托盘。创建工件时,需定义其几何形状、尺寸和物理属性(如质量、质心位置),这些参数影响机器人的负载计算和运动规划。在工件设置完成后,用户可将其放置在工作站中的初始位置,并指定目标位置,以模拟搬运任务。
外围设备添加是提升仿真真实性的关键步骤。在搬运应用中,外围设备包括传送带、传感器、夹具、安全围栏等,它们与机器人协同工作,实现自动化流程。在ROBOGUIDE中,用户可从设备库选择标准模型或导入自定义设备。例如,添加传送带时,需设置其速度、方向和触发条件,以模拟工件输送;而添加夹具时,则需配置其开合动作,并与机器人控制器同步。传感器(如光电传感器)可被用于检测工件位置,触发机器人动作,从而模拟真实世界的交互逻辑。
操作流程中,用户需通过ROBOGUIDE的图形界面进行设备布局和参数配置。例如,在添加外围设备后,通过I/O信号映射连接设备与机器人控制器,确保仿真中的通信与实际系统一致。用户可利用仿真功能测试设备协同性,如验证夹具在抓取工件时是否与传送带同步,避免碰撞或时序错误。这一过程不仅提高了编程效率,还降低了现场调试风险。
ROBOGUIDE的工件创建和外围设备添加功能为机器人搬运应用提供了全面的虚拟仿真解决方案。通过精确建模和动态测试,用户可以在投入实际生产前优化工作站布局和程序逻辑,显著提升自动化系统的可靠性和效率。